
www.engineering-russia.com
29
'14
Written on Modified on
"CAN FD" бросает вызов промышленным шинам и промышленному Ethernet в оборудовании специального назначения
Протокол CAN FD дает возможность использовать существующие CAN системы и наработанные по ним знания даже при повышении требований к количеству узлов, скорости передачи и времени цикла. Как именно, объясняет Thomas Waggershauser из компании HMS.
Bозможные применения CAN FD
Растущие требования к количеству узлов, скорости передачи и времени цикла ограничены возможностями классической сети CAN (8 бит данных и скоростью передачи 1 Мб/с). Скорость передачи данных, которая зависит от разветвленности сети, и здесь особую роль играют аналоговые и короткие служебные данные.
В повседневной практике такие ограничения часто обходят путем компромисса: разделением системы на ряд сетевых сегментов различного назначения – или даже параллельных сетей – это означает, что существующая технология определенно исчерпала себя и часто приводит к громоздким и сложным в конфигурировании, установке и обслуживании решениям. В принципе, можно перейти на скоростной промышленный Ethernet. Разветвленные сети обычно требуют повышенного инвестирования, а изменения структуры данных и привычной конфигурации, в частности, для изменяющихся во времени систем, часто создают значительные затруднения. Кроме того, многих отпугнет необходимость перехода на иные средства разработки, методы обслуживания и ввода в эксплуатацию.
В то же время желательно пользоваться уже наработанными навыками.
CAN FD применяется в таких областях: CAN FD (CAN с гибкой скоростью передачи данных) является расширенной версией "классической" сети CAN, которая была внедрена компанией Bosch в 2012 году, и значительно расширяет доступные диапазоны скорости передачи и длинны данных. С другой стороны, сохраняются опробованные и испытанные концепции сетей CAN: арбитраж на основании идентификаторов сообщений, управляемая событиями диспетчеризация сообщений и подтверждение приема сообщений битом подтверждения.
Улучшенная скорость передачи данных
Применяемое к классической сети CAN подтверждение приема сообщения дает множество преимуществ за счет подтверждения получения в пределах передаваемого сообщения – быстрое обнаружение возможных ошибок передачи позволяет тут же передать эти данные повторно.
Основанный на идентификаторе CAN арбитраж сообщений также дает преимущества для управления приложениями в недопущении коллизий при передаче данных и обеспечению малого времени ожидания для высокоприоритетных сообщений даже при большой нагрузке сети.
К недостаткам методов относится то, что на время выборки во избежание отказа на всех узлах должен быть один и тот же уровень шины. Соответственно, длина межбитового интервала должна быть достаточной для распространения сигнала между самыми взаимоудаленными узлами сети с учетом времени активации шины. Следовательно, межбитовый интервал прямо зависит от длины сети; так длина в 40 м ограничит скорость передачи на 1 Мб/с, а при 250 м допускается скорость не выше 250 кб/с.
Для значительного ускорения передачи данных без изменения вида сети CAN FD работает с двумя скоростями передачи данных. "Арбитражная скорость" для команд управления (включая арбитраж, тип сообщения, обнаружение конца и подтверждение) зависит от скорости распространения и, соответственно, длины сети. А вот для передачи данных и защиты данных может применяться вторая "скорость передачи данных". При этом шину будет занимать только передающий узел, что делает необязательной непосредственную обратную связь в пределах времени распространения бита. Поэтому максимально достижимая скорость передачи данных зависит только от физической полосы пропускания среды передачи, а не от времени распространения сигнала. На сегодняшний день сети CAN FD уже могут эффективно работать на скоростях 8 Мб/с, хотя сам стандарт CAN FD допускает до 15 Мб/с. Такая скорость передачи данных была успешно использована в различных испытательных системах.
Обе скорости передачи данных устанавливаются независимо друг от друга в регистрах тактовой синхронизации контроллера CAN FD. Переключение между скоростями производится с помощью двух управляющих бит протокола. Первый, прежде зарезервированный бит "Расширенной длины данных" (EDL – Extended Data Length) рецессивным уровнем задает сообщение CAN FD. Для включения повышенной скорости при взятии выборки добавлен новый "Бит переключения скорости" (BRS – Bit Rate Switch). Обратное переключение выполняется при получении контрольной суммы.
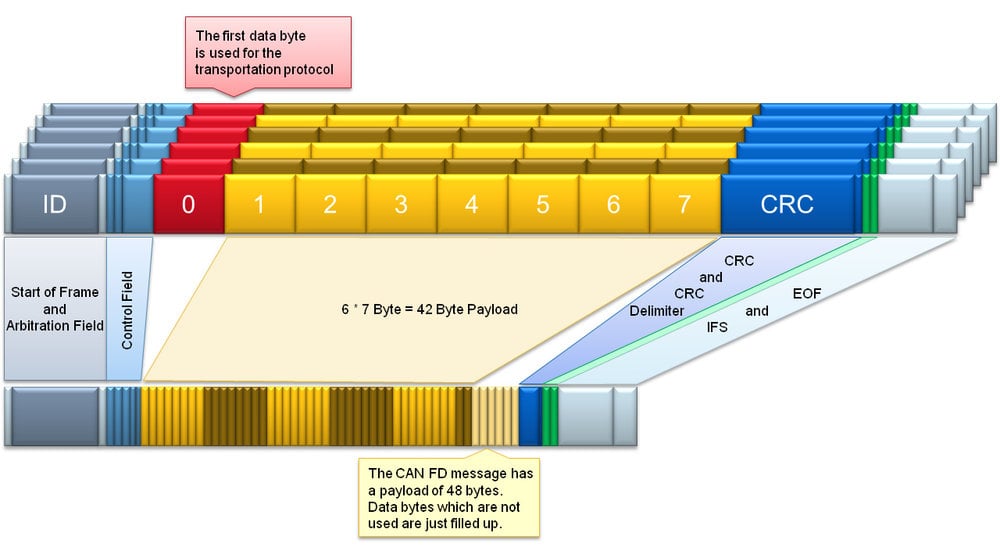
Рисунок 1. Преимущества сети CAN FD - 1) В этом примере передаются 42 байта данных конфигурации. В классической сети CAN для этого нужно применять транспортный протокол, чтобы передать общее количество данных в 8-байтных сообщениях. Пример основан на модели транспортного протокола, в которой для управления потоком данных используется только первый байт данных. Это значит, что для каждого сообщения в сети CAN доступно до 7 байт. В зависимости от реализации транспортного протокола для управления могут понадобиться дополнительные поля данных. Ниже для сравнения представлено одно сообщение сети CAN FD с 48 байтами пользовательских данных, которыми можно заменить 6 сообщений классической шины CAN. Поскольку эти данные передаются при более высокой скорости, то для передачи всего вышеописанного сообщения шине CAN FD потребуется значительно меньше времени, чем классической CAN. Кроме того, передача в CAN FD всех данных одним сообщением значительно упрощает администрирование потоков данных.
Большие объемы пользовательских данных
Данные управления по прежнему передаются на тех же знакомых низких скоростях, что ограничивает достижимые скорости передачи данных. При увеличении поля пользовательских данных до 64 байт можно передать больший объем на ускоренной скорости, что даст значительное ускорение.
В классической сети CAN данные передаются только по 8 байт, что на сегодняшний день для многих применений не эффективно, например, для передачи прецизионных аналоговых значений или команд управления многокоординатным роботизированным оборудованием с приемом данных датчиков перемещения. Для этого также следует добавить служебные данные, что до настоящего времени значительно снижало эффективность из-за транспортных протоколов, требуемых для передачи более 8 байт.
Теперь протокол CAN FD предлагает вариант использования до 64 байт. При этом в одном сообщении можно передавать блоки данных большего размера, что особенно важно при обработке данных и позволяет полностью управлять более сложным устройством одним сообщением. Это также снижает количество передаваемых служебных данных транспортного протокола, поскольку одного сообщения CAN FD обычно хватает для передачи данных конфигурации и т. п.
Для сокращения излишних данных управления в CAN FD используется только 4 байта для обозначения длины данных – причем значения от 0 до 8 взяты непосредственно из классического CAN. Большие значения (т. е. от 9 до 15 или от 1001 до 1111) применяются для назначения новых расширенных длин данных: теперь для пользовательских данных также доступны длины 12, 16, 20, 24, 32, 48 и 64 байт. Иные значения длины данных не допускаются, т. е. неиспользуемые места заполняются "незначащими значениями".
Помимо увеличения скорости в CAN FD также можно заметно повысить эффективность передачи данных за счет значительного уменьшения длительности цикла. Таким образом, в сети CAN FD со скоростью арбитража 500 кб/с, скоростью передачи 4 Мб/с и длиной сообщения данных 64 байта можно достичь эффективной скорости передачи более 5 Мб/с.
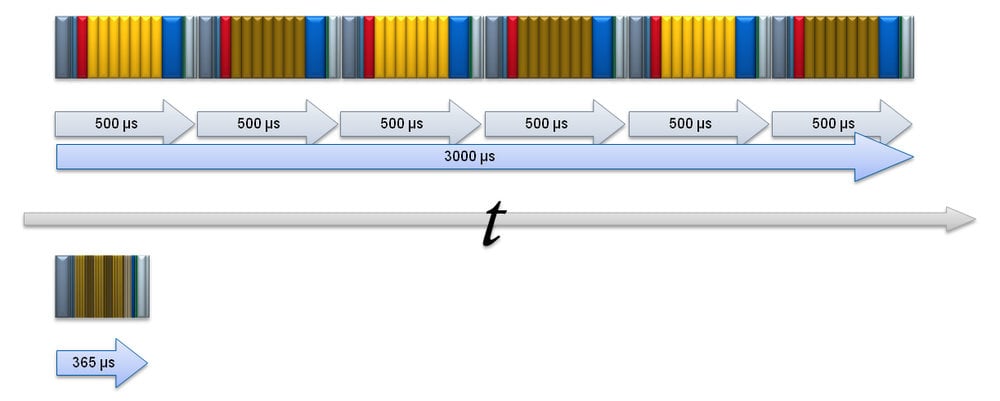
Рисунок 2. Преимущества сети CAN FD 2
Показаны сообщения сети CAN в одном масштабе времени: для классического CAN здесь предполагается скорость 250 кб/с. Для сообщений с 8 байтами пользовательских данных (в этом примере 1 байт транспортного протокола и 7 байт пользовательских данных) и максимально возможного количества подстановочных бит в классической сети CAN такое сообщение займет около 500 мкс шинного времени. Если передающий узел может послать все шесть сообщений последовательно без задержки, то для передачи 42 пользовательских данных шина будет полностью заблокирована на три миллисекунды. Для сравнения, в CAN FD сообщение с 48 байтами пользовательских данный, скоростью арбитража 250 кб/с и скоростью передачи данных 2 Мб/с занимает шину около 365 мкс даже с максимальным количеством постановочных бит. Значительное ускорение передачи данных также улучшает работу CAN систем реального времени за счет заметного сокращения времени отклика при увеличении скорости передачи данных и упрощении администрирования!
Способность работы в режиме реального времени
Объединение множества независимых пакетов данных в одном сообщении означает значительное упрощение администрирования, поскольку теперь не нужно большой ценой синхронизировать отдельные сообщения друг с другом. Передача больших пакетов данных на большой скорости позволяет передавать в 8 раз больший объем данных (64 байта) приблизительно за то же время передачи одного 8-байтного сообщения классической сети CAN. Таким образом, высокоприоритетные сообщения могут передаваться значительно быстрее, что повышает способность работы в реальном времени.
Защита данных
Защита данных имеет важное значение для: Несмотря на увеличение размера пакета данных по сравнению с классической CAN, сеть CAN FD соответствует тем же требованиям защиты данных. Это достигается, например, удлинением контрольной суммы и адаптацией алгоритма ее вычисления. В зависимости от количества переданных данных применяется один из трех алгоритмов: предыдущий, для сообщением длиной до 8 байт и двумя улучшенными, для сообщений длиной до или более 16 байт. Алгоритм выбирает CAN контроллер по коду длине данных.
Для повышения защищенности данных следует принять дополнительные предположения. Как результат, контрольная сумма сообщений сети CAD FD всегда начинается с подстановочного бита; после других 5 бит добавляется подстановочный бит – в отличие от правила подстановочного бита для классической CAN здесь он не зависит от значений предыдущих бит. Значение каждого подстановочного бита дополняет значение предыдущего подстановочного бита.
Обратная совместимость.
Одним недостатком перехода от сети CAN на более скоростную систему передачи обычно является необходимость коренных изменений: Все устройства сети CAN должны быть адаптированы в новую систему, например EtherCAT. Либо для применения в гетерогенных сетях может быть расширена функциональность контроллера оборудования. Оба варианта имеют свои преимущества и недостатки. В сети CAN FD теперь доступна опция "в старом режиме": Контроллеры CAN FD могут также работать в режиме классических узлов сети CAN, что позволяет заменять существующие узлы сети на новые, совместимые с CAN FD, постепенно. Все преимущества CAN FD проявятся после замены на новые всех устройств сети. В особенности это представляет интерес для оборудования специального назначения, где нет возможности заменить все сетевые устройства, некоторые из которых могут отсутствовать в продаже, быть специфичными или заказными.
Средства, доступные для CAN FD
Для разработки устройств и сетей CAN FD существует ряд технических решений, в частности, ПК-CAN FD интерфейсные карты для различных интерфейсов ПК, например, карты IXXAT CAN-IB 500/600 PCIe компании MS Networks. Эти CAN карты комплектуются всесторонним пакетом драйверов для Windows, Linux и других операционных систем и могут легко подключаться к существующим системам и быстро добавлять существующие программные пакеты сетей CAN FD для поддержки устройств CAN и CAN FD.
Кроме физических интерфейсов и соответствующих драйверов для эффективного внедрения CAN FD также требуются средства проверки и анализа состояния. В отношении этого компания HMS в ближайшее время планирует предложить высокопроизводительное законченное техническое решение по убедительной цене, которое является CAN FD-совместимой версией широко известного IXXAT CAN-анализатора.
Открытые вопросы применения CAN FD в промышленном секторе
Кроме вышеуказанного средства есть другие важные аспекты применения технологий CAN FD в промышленном оборудовании. Для применения в промышленности рекомендуется использовать стандартизованные верхние протоколы: в CAN автоматизации (CiA) проделана работа по переходу с CANopen на CAN FD – к середине года ожидается готовность спецификации CANopen V5, которая также содержит расширения для CAN FD.
Кроме того, важные аспекты применения CAN FD касаются недорогих серийных микроконтроллеров со встроенными схемами CAN/CAN FD. Доступные на сегодняшний день устройства в основном используют матрицы FPGA с CAN FD IP ядрами. Микроконтроллеры со встроенной логикой CAN FD часто представляют собой высокопроизводительные компоненты с несколькими ядрами ЦПЭ для создания сложных устройств управления транспортными средствами. Пока не станут доступными недорогие микроконтроллеры со встроенной поддержкой CAN FD, наиболее гибким решением будут оставаться системы на матрицах FPGA.
Перспективы
CAN FD расширяет область применения существующих решений CAN за счет значительного повышения скорости передачи, простоты конфигурирования и сохранения наработанных возможностей анализа, известных по классическим промышленным шинам. Ожидаемая вскоре доступность CANopen для сетей CAN FD означает, что новые сетевые системы уже можно внедрять в промышленный сектор, и получать эффективные технические решения для сетей со скоростью передачи данных от 100 кб/с до 5 Мб/с. Возможность увеличения скоростей и/или объемов передачи данных вместе с присущей ему гибкостью делает CAN FD особенно удобным для создания адаптируемой промышленной сетевой системы для оборудования специального назначения.


Автор Томас Ваггерхаузер
Коммерческий директор IXXAT Automation GmbH, подразделение HMS Group
Получите дополнительную информацию…
